原创文章,转载请注明出处~~ http://www.cnblogs.com/justinzhang/
问题描述:给定平面上N个点的坐标,找出距离最近的两个点。
这是编程之美2.11的一道题目,从昨天到现在就一直在设法解决它;如果用常规的解法,只需要将N个点两两计算距离,然后找出最小距离的两个点就可以了;但是这种解法的算法复杂度为O(N^2); 为了降低算法的复杂度,我们需要有更好的方法。这里我们找到的解法是分治法。
设点集为S,|S|=N,S的横坐标集合为Sx,纵坐标集合为Sy;
算法的步骤如下:
1.找出Sx的中位数:median_Sx;用median_Sx对点集S进行划分,左边的为S1,右边的为S2;
2.分别求出S1和S2中的最近点对,设S1和S2中最近点对的距离分别为:delta(S1), delta(S2);
3.求出S1和S2最近点对距离的较小值:Delta = min{delta(S1), delta(S2)};
4.找出S2中y值前6大的点,设为S2’.(此处不用排序,用O(n)时间找出第i大的点,因为排序的时间复杂度为O(n*logn), 网上绝大部分的算法是用排序,显然用排序的方法来找出前6大的点效率低下);
5.对于S1中的每一个点,与S2’中的每一个点计算距离delta’, 如果delta’ < Delta,令Delta=delta’;
现在我们分析一下上述算法的时间复杂度,由于我们采用中位数进行划分,每一次划分都能确保点集被分为大小相当的两个部分,所以:
T(n)= 2*T(n/2) + 合并复杂度。 由于合并的时候,是用S1中的n/2个点和S2中最多6个点进行比较,比较的次数为n/2 * 6 = 3n. 所以
T(n)= 2*T(n/2)+O(n). 由《算法导论》中文第二版44页的主定理,可知T(n) = O(n*log(n));
算法第4步中,为什么只用选取S2中最多前6大的6个点进行比较呢?对这个问题,《编程之美》上没有说清楚,这里再详细的论证下;
如下图所示:
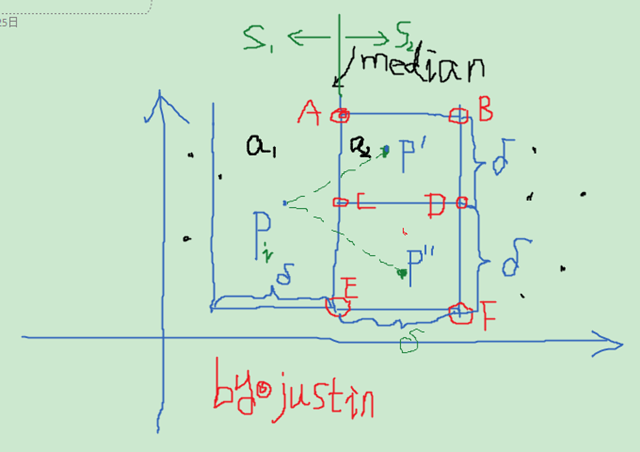
在上图中,我们有一系列的点,按照上述的算法,我们利用median(中位数)将点分为了S1和S2两个部分,安装算法的第2、3步我们可以求得δ,在图中median线的左边和右边,距离其δ的距离,分别作两条直线,和直线median一起,我们得到了两个区域,分别为a1、a2,如图所示。由于δ是S1和S2中距离较小者,由此可知,a1和a2区域内不可能再存在距离<δ的两个点对。那么,最近点对要么是S1,S2各自内部的某两个点,或者是一个点在S1中、一个点在S2中。在求得δ后,我们只需要查看是否存在两个点,他们满足条件:一个在a1中,一个在a2中;并且它们之间的距离d<δ; 仔细观察上图,我们来证明区域a2中最多只可能存在6个点;
根据δ定义,我们知道,a2中的任意两点的距离都必须大于δ,否则与δ的定义相矛盾。如下图所示,我们将δ*2δ的矩形区域,分成边长为1/2δ *2/3δ的六个小矩形,如图中的红色编号1..6所示。我们假设该区域内的点大于6个,那么根据鸽笼原理,那么必然有一个小矩形中存在至少两个点,这两个点的距离必然小于边长为1/2δ *2/3δ矩形的对角线,即D^2<(1/2δ)^2 + (2/3δ)^2=(5/6δ)^2<δ^2;所以a2矩形区域当中的点数不可能大于6.最多就6个点,这种情况是如上图中红色的A,B…EF所示。

根据上面的算思想,我们利用线性时间O(n)查找中位数的算法,来找到中位数,并且对集合进行划分,这样就确保了每次都是T(n)=T(n/2)+O(n).关于中位数和顺序统计学可以参考:http://www.cnblogs.com/justinzhang/archive/2012/04/24/2469009.html 。
本问题的代码如下所示(有点长),有错误的地方还望大家批评指正~~
/*Author:JustinZhangTime:2012年4月24日11:29:25End: 2012年4月25日16:56:35Email:uestczhangchao@gmail.comDesc:平面上有N个点,找出N个点中距离最近的两个点;如果用穷举法,那么算法的复杂度将达到O(n^2);本算法采用分治法,可以将复杂度降低到O(n*log(n));*/#include <iostream>
#include <vector>
#include <iomanip>
#include <algorithm>
#include <cmath>
using namespace std;
//delta=min{min(dest(S1), min(dest(S2}}.double delta = INT_MAX;void swap(int &x, int &y)
{ int tmp = x;x = y;
y = tmp;
}
//插入排序算法void insert_sort(vector<int>&A, int p, int r)
{ int i,j; int key = 0; for (i=p+1; i<=r; i++) {key = A[i];
j = i - 1;
while (j>=p && A[j]>key) { A[j+1] = A[j];//将A[j]往前移动j--;
}
A[j+1] = key;
}
}
//将整型容器划分为两个部分int partion(vector<int> &A,int p, int r)
{ int count = p - 1; int key = A[r];for (int i=p; i<=r-1; i++)
{ if (A[i] < key) {count++;
swap(A[count],A[i]);
}
}
swap(A[count+1],A[r]);
return count+1;}
//根据算法导论上的思想,取得中位数的中位数int get_median(vector<int>&data, int p, int r)
{ int i=0, j=0;int n = r - p + 1; //获得原始数组数据个数
int remains = n%5; int int_count = n - remains; int int_group = int_count/5;int group_count = (n+4)/5; //计算出五个元素一组的组数;
//int *group_median = new int[group_count]; vector<int> group_median(group_count); if (p==r) { return data[p];}
//以下代码求出五个元素为一组的中位数if (0 == remains) //如果元素的个数正好可以分为以5个元素为单位的整数组
{ for (i=p; i<=r-4; i=i+5) {insert_sort(data, i, i+4);
group_median[(i-p)/5] = data[p+2];
}
}
else { for (i=p; i<=(r-remains-4);i=i+5) {insert_sort(data, i, i+4);
group_median[(i-p)/5] = data[i+2];
}
//处理不够5个元素的组,改组开始的序号为r-remains+1,结束序号为rinsert_sort(data,r-remains+1,r);
group_median[group_count-1] = data[r-remains+1+remains/2];
}
if (group_count==1) { return group_median[0];}
else { return get_median(group_median,0,group_count-1);}
return 0;}
/*就是因为get_position函数写错了,导致很久都没有能够发现错误,要仔细啊~~*/int get_position(vector<int> &A, int p, int r, int key)
{for (int i=p; i<=r; i++)
{ if (A[i]==key) { return i;}
}
return -1;}
//该函数是为了找到数组A中,第seq小的数int select(vector<int> &A,int p, int r, int seq)
{ //获得数组A的中位数的中位数,将其作为划分数组的支点 int pivot_key = get_median(A, p, r); int pos = get_position(A,p,r,pivot_key);swap(A[pos],A[r]);
int i = partion(A, p, r); int x = i - p + 1; if (seq == x) { return A[i];}
else if (seq < x)
{select(A, p, i-1, seq);
}
else {select(A, i+1, r, seq-x);
}
}
class Point{public: int x; int y;Point(int x=0, int y=0)
{ this->x = x; this->y = y;}
Point& operator=(const Point &p)
{ this->x = p.x; this->y = p.y;return *this;
}
Point(const Point &pp) { this->x = pp.x; this->y = pp.y;}
friend ostream &operator<<(ostream &os, const Point & p)
{os<<"("<<p.x<<"," << p.y << ")";
return os;}
};
//将两个点交换void swap_point(Point &p1, Point &p2){Point tmp = p1;
p1 = p2;
p2 = tmp;
}
//根据点容器的最后一个点,将点集合划分为两个部分int partion_Point_Set(vector<Point> &p,int l, int r)
{ int count = -1; int key = p[r].x; for (unsigned i=0; i<=p.size()-2; i++) { if (p[i].x<key) {count++;
swap_point(p[i],p[count]);
}
}
swap_point(p[count+1],p[r]);
return count+1;}
//获得两点间的距离double Distance(const Point &p1, const Point &p2)
{ int x = (p1.x - p2.x); int y= (p1.y - p2.y);double distance = sqrt((double)(x*x+y*y));
return distance;}
//找到两个数的最小值double min(double x, double y)
{ if (x>y) { return y;}
else { return x;}
}
//按照点的x坐标来检索点在容器中的位置int get_point_position_x(const vector<Point> &p, int l, int r, int x_key)
{for (int i=l; i<=r; i++)
{ if (p[i].x == x_key) { return i;}
}
return -1;}
//按照点的y坐标来检索点在容器中的位置int get_point_position_y(const vector<Point> &p, int l, int r, int y_key)
{for (int i=l; i<=r; i++)
{ if (p[i].y == y_key) { return i;}
}
return -1;}
//找到p中y坐标第order大的点Point select_point(vector<Point> &p,int l, int r, int order)
{ vector<int> point_y; for (int i=l; i<=r; i++)
{point_y.push_back(p[i].y);
}
int key_y = select(point_y,0,point_y.size()-1,order); int position_y = get_point_position_y(p, 0, p.size()-1,key_y); return p[position_y];}
double get_minimum_distance(vector<Point> &p,int l, int r,vector<Point> &result)
{ int i=0,j=0;if ((r-l+1)==2)//如果点数为两个
{ double ret = Distance(p[l],p[r]); if (ret < delta) { result[0]=p[l];
result[1]=p[r];
}
return ret;}
else if ((r-l+1)==3) //如果点数为3个
{ double tmp_dis1 = Distance(p[l],p[l+1]); double tmp_dis2 = Distance(p[l],p[l+2]); double tmp_dis3 = Distance(p[l+1],p[l+2]); double ret = min(min(tmp_dis1,tmp_dis2),tmp_dis3); if (ret <delta ) { if (tmp_dis1 == ret) {result[0] = p[l];
result[1] = p[l+1];
}
else if (tmp_dis2==ret)
{result[0]=p[l];
result[1]=p[l+2];
}
else {result[0]= p[l+1];
result[1]= p[l+2];
}
}
return ret;}
else //大于三个点的情况
{ //求出点集p的x坐标和y坐标 vector<int> Pointx; vector<int> Pointy; for (i=l; i<=r; i++) {Pointx.push_back(p[i].x);
Pointy.push_back(p[i].y);
}
//找到点x坐标的中位数 int x_median = select(Pointx,0,Pointx.size()-1,(Pointx.size()+1)/2); int point_median_pos = get_point_position_x(p,l,r,x_median);swap_point(p[point_median_pos],p[r]);
//利用找到的中位数对点集进行划分 int point_pivot_index = partion_Point_Set(p,l,r); //利用x坐标作为中位数,将点集合划分好后,递归的求中位数左边点集S1和右边点集合S2距离最小值; //考虑如何将距离最小的两个点保存下来 double min_s1 = get_minimum_distance(p,l,point_pivot_index,result); double min_s2 = get_minimum_distance(p,point_pivot_index+1,r,result); if (min_s1>min_s2) {delta = min_s2;
}
else { //result[0] = tmp_result1; //result[1] = tmp_result2;delta = min_s1;
}
//现在已经递归的求到了S1和S2中点集合最短距离,下面开始求S1和S2之间点之间的距离 //找出点集合S2中,y坐标前六大的点,如果|S2|<6,则只需找出|S2|个点 int size_s2 = (r-point_pivot_index<6)?r-point_pivot_index:6;vector<Point> S2;
Point tmp;
for (i=1;i<=size_s2;i++) {tmp = select_point(p,point_pivot_index+1,r,i);
S2.push_back(tmp);
}
for (i=l; i<=point_pivot_index; i++) { for (j=0; j<size_s2; j++) { double d = Distance(p[i],S2[j]); if (d < delta) {result[0]= p[i];
result[1]= S2[j];
delta = d;
}
}
}
return delta;}
}
void getinput(vector<Point> &p){ int i;Point pp;
int Pointnumber = 0; cout << "please input Point numbers" <<endl;cin >> Pointnumber;
for (i=0; i<Pointnumber; i++) {cin >> pp.x;
cin >> pp.y;
p.push_back(pp);
}
}
int main(){vector<Point> result(2);
vector<Point> input;
getinput(input);
double minimum_distance = get_minimum_distance(input,0,input.size()-1,result);cout << "The nearest point is: "<<result[0] << " and " << result[1] << endl;
cout << "their distance is : "<<minimum_distance << endl; return 0;}
运行结果如下:

代码描述:
1)对点集S的点x坐标和y坐标进行升序排序,获得点集Sx和Sy
2)令δ=∞; //δ为最小点位距离
3)Divide_conquer(Sx,Sy,δ) //分治法
if (Sx.count=1) then δ=∞; //如果Sx中只有一个点,则δ=∞
return δ;
else if(Sx.count=2 and d(Sx.[0],Sx.[1])<δ) //如果Sx中只有2个点,则δ为两点之间距离
δ=d(Sx.[0],)Sx.[1]);
return δ;
else //如果Sx中多于2个点,则将Sx,Sy分治,以中心点画线,将Sx分为左右两部分SxL和SxR,Sy分为SyL和SyR
j1=1,j2=1,k1=1,k2=1;
mid = Sx.count/2; //mid为Sx中的中间点点号
L = Sx.[mid].x; //L为Sx中的中间点x坐标
for(i=1,i<Sx.count,i++)
{
if(i<=mid) //将Sx中间线以左地方的点存入到SxL,新数组保持原来的升序性质
SxL[k1] = Sx[i] k1++;
else //将Sx中间线以右的地方的点存入到SxR,新数组保持原来的升序性质
SxR.count[k2] = Sx[i] k2++;
if(Sy[i].x <L) //将Sy中间线以左地方的点存入到SyL,新数组保持原来的升序性质
SyL[j1] = Sx[i] j1++;
else //将Sy中间线以右地方的点存入到SyR,新数组保持原来的升序性质
SyR[j2] = Sx[i] j2++;
}
δL = Divide_conquer(SxL,SyL,δ); //获取Sx中的的最小点位距离δL
δR = Divide_conquer(SxR,SyR,δ); //获取Sy中的的最小点位距离δR
δ= min (δL,δR);
δ=merge(SyL,SyR,δ); //获Sx中Sy交界处的最小点位距离,并综合 δL和δR 求出点集的最小点位距离δ
return δ;
函数merge(SyL,SyR,δ)
merge(SyL,SyR,δ)
{
i1=1,i2=1;
for(i=1,i<SyL.count,i++) //获取SyL中在左边虚框(距离小于δ)内的点,存入到S’yL中,新数组保持原来的升序性质
{
if(SyL[i].x>L-δ)
then S’yL[i1]= SyL[i], i1++,
}
for(i=1,i<SyR.count,i++) //获取SyR中在右边虚框(距离小于δ)内的点,存入到S’yR中,新数组保持原来的升序性质
{
if(SyR[i].x<L+δ)
then S’yR[i2]= SyR[i], i2++,
}
t=1;
for(i=1,i<S’yL.count,i++)
{
while(S’yR[t].y< S’yL[t].y and t < SyR.count) //获取点集S’yR内距离点S’yL[t]y坐标最接近的点号
{ t++; }
for( j= max(1,t-3), j<=min(t+3,S’yR.count),j++) //计算S’yR中的点与S’yL[t]y坐标相邻的六个点的距离
{
if(d(S’yL[i],S’yL[j])<δ) //如果前两点之间距离小于δ
then δ = d(S’yL[i],S’yL[j]); //则最小点位距离δ为当前两点之间距离
}
return δ
}
3)算法时间复杂度:
首先对点集S的点x坐标和y坐标进行升序排序,需要循环2nlogn次,复杂度为O(2nlogn)
接下来在分治过程中,对于每个S’yL中的点,都需要与S’yR中的6个点进行比较
O(n)= 2O(n/2) + (n/2)*6 (一个点集划分为左右两个点集,时间复杂度为左右两个点集加上中间区域运算之和)
其解为O(n)< O(3nlogn)
因此总的时间复杂度为O(3nlogn),比蛮力法的O(n2)要高效。