一、神经网络基础
1. 神经元模型
神经网络中最基本的单元是神经元模型(neuron)。
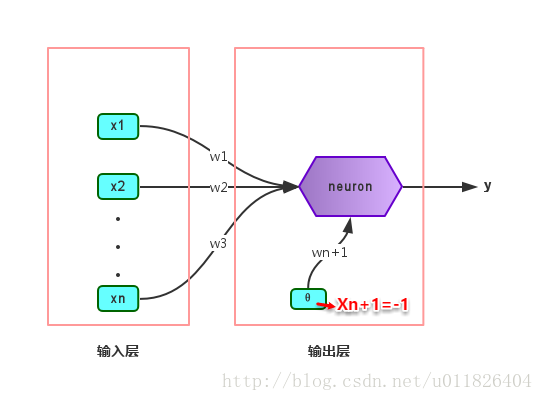
细胞体分为两部分,前一部分计算总输入值(即输入信号的加权和,或者说累积电平),后一部分先计算总输入值与该神经元阈值的差值,然后通过激活函数(activation function)的处理,产生输出从轴突传送给其它神经元。M-P神经元模型如下图所示:

2. 激活函数
与线性分类十分相似,神经元模型最理想的激活函数也是阶跃函数,即将神经元输入值与阈值的差值映射为输出值1或0,若差值大于零输出1,对应兴奋;若差值小于零则输出0,对应抑制。但阶跃函数不连续,不光滑,故在M-P神经元模型中,也采用Sigmoid函数来近似, Sigmoid函数将较大范围内变化的输入值挤压到 (0,1) 输出值范围内,所以也称为挤压函数(squashing function)。

更多激活函数参考: https://www.jianshu.com/p/22d9720dbf1a
3. 感知机(Perceptron)
感知机(Perceptron)是由两层神经元组成的一个简单模型,但只有输出层是M-P神经元,即只有输出层神经元进行激活函数处理,也称为功能神经元(functional neuron);输入层只是接受外界信号(样本属性)并传递给输出层(输入层的神经元个数等于样本的属性数目),而没有激活函数。这样一来,感知机与之前线性模型中的对数几率回归的思想基本是一样的,都是通过对属性加权与另一个常数求和,再使用sigmoid函数将这个输出值压缩到0-1之间,从而解决分类问题。不同的是感知机的输出层应该可以有多个神经元,从而可以实现多分类问题,同时两个模型所用的参数估计方法十分不同。
感知机权重学习过程
感知机的学习采用随机梯度下降算法(SGD)该算法的说明可以参考:http://www.cnblogs.com/NeilZhang/p/8454890.html

其中 η∈(0,1)称为学习率,可以看出感知机是通过逐个样本输入来更新权重,首先设定好初始权重(一般为随机),逐个地输入样本数据,若输出值与真实标记相同则继续输入下一个样本,若不一致则更新权重,然后再重新逐个检验,直到每个样本数据的输出值都与真实标记相同。容易看出:感知机模型总是能将训练数据的每一个样本都预测正确,和决策树模型总是能将所有训练数据都分开一样,感知机模型很容易产生过拟合问题。
局限性:
感知机只有输出层神经元进行激活函数处理,即只拥有一层功能神经元,其学习能力非常有限。 可以证明若二类模式是线性可分的,即存在一个线性超平面能将他们分开,则感知机的学习一定会收敛(converge)而求得适当的权向量w = (w1,w2,w3…..); 否则感知机学习过程将会发生震荡,w难以稳定下来,不能求得合适解。
要解决非线性可分问题需要考虑使用多层功能神经元,即神经网络。(神经网络发展史上经典问题:异或问题单层网络不能解决)
4.神经网络
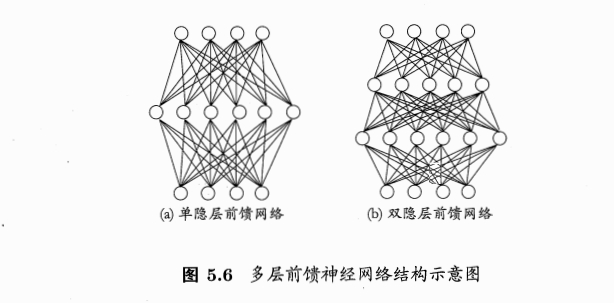
多层神经网络的拓扑结构如下图所示:
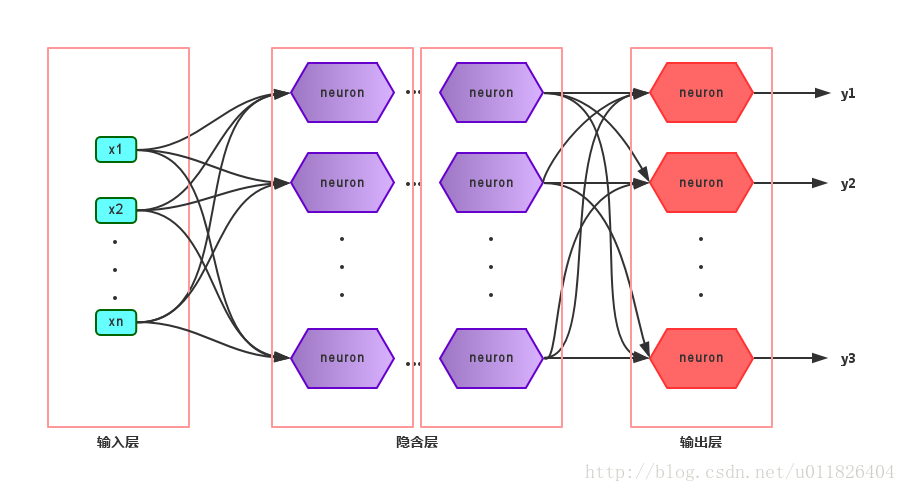
在神经网络中,输入层与输出层之间的层称为隐含层或隐层(hidden layer),隐层和输出层的神经元都是具有激活函数的功能神经元。只需包含一个隐层便可以称为多层神经网络,常用的神经网络称为“多层前馈神经网络”(multi-layer feedforward neural network),该结构满足以下几个特点:
* 每层神经元与下一层神经元之间完全互连
* 神经元之间不存在同层连接
* 神经元之间不存在跨层连接
根据上面的特点可以得知:这里的“前馈”指的是网络拓扑结构中不存在环或回路,而不是指该网络只能向前传播而不能向后传播
二、误差逆传播算法(BP神经网络算法)
神经网络的学习主要蕴含在权重和阈值中,多层网络使用上面简单感知机的权重调整规则显然不够用了,BP神经网络算法即误差逆传播算法(error BackPropagation)正是为学习多层前馈神经网络而设计,BP神经网络算法是迄今为止最成功的的神经网络学习算法。
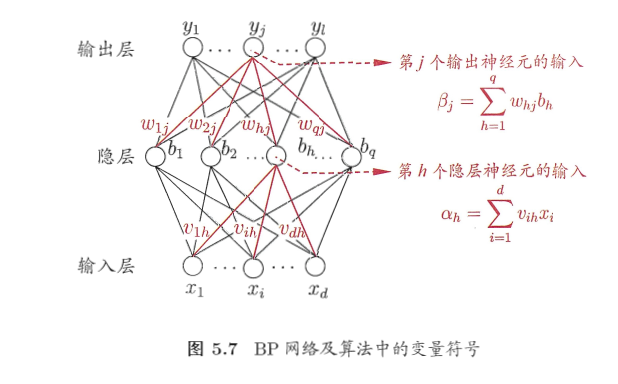
上图的网络中有(d+l+1)*q+l个参数需要确定:输入层到隐层的d×q个权重,隐层到输出层q×l个权重、q个隐层神经元的阈值、l个输出神经元的阈值。
上图为一个单隐层前馈神经网络的拓扑结构,BP神经网络算法也使用梯度下降法(gradient descent),以单个样本的均方误差的负梯度方向对权重进行调节(sgd算法)。
学习率η∈(0,1)控制着沿反梯度方向下降的步长,若步长太大则下降太快容易产生震荡,若步长太小则收敛速度太慢,一般地常把η设置为0.1,有时更新权重时会将输出层与隐含层设置为不同的学习率。
可以看出:BP算法首先将误差反向传播给隐层神经元,调节隐层到输出层的连接权重与输出层神经元的阈值;接着根据隐含层神经元的均方误差,来调节输入层到隐含层的连接权值与隐含层神经元的阈值。BP算法基本的推导过程与感知机的推导过程原理是相同的,下面给出调整隐含层到输出层的权重调整规则的推导过程:
1. 误差函数

2. 具体推导过程
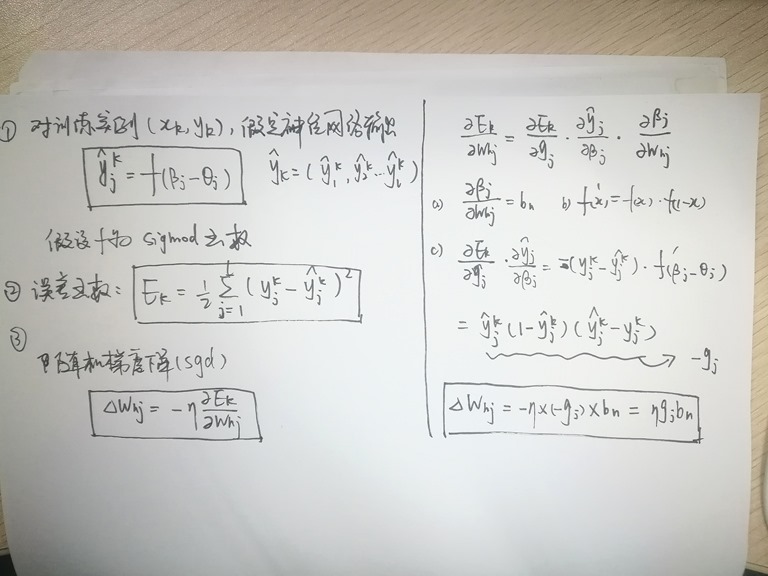
其它参数的推算过程相似,参考《机器学习》中神经网络的介绍。
上述算法的推导是基于每次仅针对一个训练样例更新权重和阈值(标准BP算法),这种算法参数更新十分频繁,可能会出现“抵消”现象。累计BP算法针对累计误差最小化,每次读取整个数据集一遍后才对参数进行更新,其参数更新的频率低得多。
3. 过拟合
BP神经网络强大的学习能力常常容易造成过拟合问题,有以下两种策略来缓解BP网络的过拟合问题:
早停:将数据分为训练集与测试集,训练集用于学习,测试集用于评估性能,若在训练过程中,训练集的累积误差降低,而测试集的累积误差升高,则停止训练。
引入正则化(regularization):基本思想是在累积误差函数中增加一个用于描述网络复杂度的部分,例如所有权值与阈值的平方和,其中λ∈(0,1)用于对累积经验误差与网络复杂度这两项进行折中,常通过交叉验证法来估计。

4. 全局最小与局部最小
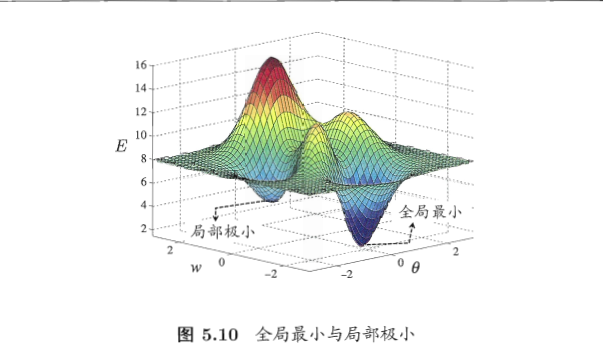
要成为局部极小点,只要满足该点在参数空间中的梯度为零。局部极小可以有多个,而全局最小只有一个。全局最小一定是局部极小,但局部最小却不一定是全局最小。显然在很多机器学习算法中,都试图找到目标函数的全局最小。梯度下降法的主要思想就是沿着负梯度方向去搜索最优解,负梯度方向是函数值下降最快的方向,若迭代到某处的梯度为0,则表示达到一个局部最小,参数更新停止。因此在现实任务中,通常使用以下策略尽可能地去接近全局最小。
* 局部极小解:参数空间中的某个点,其邻域点的误差函数值均不小于该点的误差函数值。
* 全局最小解:参数空间中的某个点,所有其他点的误差函数值均不小于该点的误差函数值。
跳出局部最小的方法:
- 以多组不同参数值初始化多个神经网络,按标准方法训练,迭代停止后,取其中误差最小的解作为最终参数。
- 使用“模拟退火”技术
- 使用随机梯度下降,即在计算梯度时加入了随机因素,使得在局部最小时,计算的梯度仍可能不为0,从而迭代可以继续进行。
三、神经网络可视化
推荐一个在线测试神经网络的网站:http://playground.tensorflow.org/
下图为上述网站通过两个神经元解决异或问题:

其它机器学习算法:
监督学习——随机梯度下降算法(sgd)和批梯度下降算法(bgd)
参考:
《机器学习》 周志华
激活函数: https://blog.csdn.net/u011826404/article/details/53767428
随机梯度下降与批梯度下降: http://www.cnblogs.com/NeilZhang/p/8454890.html